

价格:
行业分类:机械及行业设备
产品类别:
品 牌:OTC
规格型号:
库 存:200
生 产 商:
产 地:中国广东省广州市
工业用机器人W-L01641OTC机器人示教器
保持焊枪位置和姿势不变的情况下,可以改变机器人的姿势;
7轴机器人的复杂示教,通过运用协调技术,实现简单的手动操作
将焊接电缆内藏于第7轴机构中,示教作业时不需要担心电缆与夹具及工件的干涉。
| AX21 | |||||
| 控制箱 | |||||
| NO. | 部品名称 | 规格 | 部品号码 | 推荐保有量 | 备注 |
| 1 | IPM驱动组件 | L20700A00(NV6/NB4) | L20700A00 | 1 | (注1) |
| L20701A00(NV6L用) | L20701A00 | ||||
| L20702A00(NB4L用) | L20702A00 | ||||
| L20703A00(NV20用) | L20703A00 | ||||
| L20704A00(NH5用) | L20704A00 | ||||
| 2 | 印刷基板 | L20400C00 | L20400C00 | 1 | CPU基板 |
| 2-1 | 电池 (纽扣锂电池) | CR2032 | 4815-002 | 1 | (注2) CPU基板用 与使用时间无关,请每3年更换一次。 |
| 2-2 | CPU风扇 | L8820C10 | L8820C10 | 1 | CPU基板用风扇 |
| 3 | 印刷基板 | L8800R00 | L8800R00 | 1 | |
| 4 | 印刷基板 | L20400S00 | L20400S00 | 1 | 储存电路板 |
| 5 | 印刷基板 | L20400F00 | L20400F00 | 1 | I/O时序基板 |
| 6 | 印刷基板 | L20400P00 | L20400P00 | 1 | 电源基板 |
| 6-1 | 保险(F1) | UXM 250V 3A | 4610-130 | 1 | |
| 7 | 印刷基板 | L20400T00 | L20400T00 | 1 | TP中继基板 |
| 8 | 电源组件 | L20420A00 | L20420A00 | 1 | 电源组件 |
| 8-1 | 转换交流器(75W 5V) | LDA75F-5-XFJKC | 4814-044 | 1 | |
| 8-2 | 转换交流器(15W 12V) | ZWS15-12/J | 100-0639 | 1 | |
| 8-3 | 转换交流器(100W 24V) | ZWS100PF-24/J | 5096-527 | 1 | |
| 8-4 | 转换交流器(240W 24V) | ZWS240PAF-24/JL | 100-0638 | 1 | |
| 9 | 强电单元 | L20421A00 | L20421A00 | 1 | |
| 9-1 | 印刷基板 | L20421C00 | L20421C00 | 1 | 电源组件基板 |
| 9-2 | 电磁接触器 | SD-N11 | 4340-116 | 3 | |
| 9-3 | 辅助接点 | UN-AX11 | 4340-117 | 3 | |
| 9-4 | 保险(F1-5) | GBT 250V 8A | 100-0643 | 5 | |
| 10 | 冷却风扇 | 4715MS-22T-B50-B00 | 100-0644 | 4 | |
| 11 | 自动制动器 | SA33C/30(3Ф) | 4614-088 | 1 | |
| 12 | 制动器把手 | BZ6N10C | 4614-089 | 1 | |
| 13 | 端子盖 | BZ6TS10C3 | 4614-090 | 1 | 制动器部 |
| 14 | 指示灯 | L21003S00 | L21003S00 | 1 | |
| 15-1 | 回生电阻 | L20400K00 | L20400K00 | 1 | 全机种使用 |
| 15-2 | 回生电阻 | L20771K00 | L20771K00 | 1 | NV6L,NB4L,NV20用 |
| 16 | 外部记忆CF | L9742U00 | L9742U00 | (1) | 256MB |
| 17 | 外部记忆CF | L8800U00 | L8800U00 | (1) | 64MB |
构造 | 垂直多关节型 | ||
轴数 | 7 | ||
手臂最大可搬重量 | 4 kg | ||
位置重复精度 | ±0.08mm(注1) | ||
驱动方法 | AC伺服马达 | ||
驱动容量 | 3550W | ||
位置反馈 | 绝对值编码器 | ||
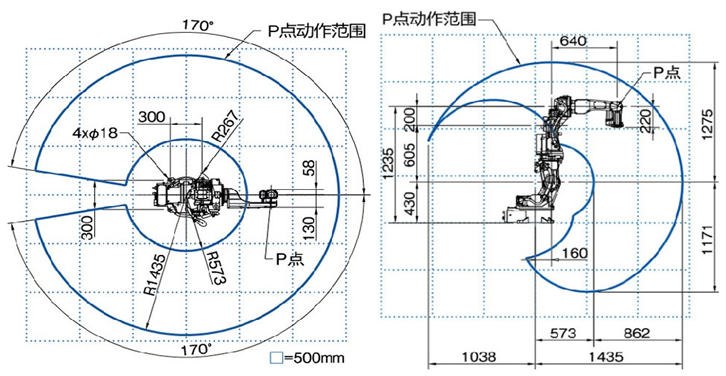
动作范围 | 基本轴 | J1(旋转1) | ±170° |
J2(前后) | -145°~+70° | ||
J7(旋转2) | ±90° | ||
J3(上下) | -170°~+142.6° | ||
手臂轴 | J4(回转) | ±155° | |
J5(摆动) | -45°~+225°(注2) | ||
J6(扭转) | ±205°(注2) | ||
最大速度 | 基本轴 | J1(旋转1) | 3.66rad/s{210°/s} |
J2(前后) | 3.66rad/s{210°/s} | ||
J7(旋转2) | 3.14rad/s{180°/s} | ||
J3(上下) | 3.66rad/s{210°/s} | ||
手臂轴 | J4(回转) | 7.33rad/s{420°/s} | |
J5(摆动) | 7.33rad/s{420°/s} | ||
J6(扭转) | 10.5rad/s{600°/s} | ||
手臂负荷能力 | 允许扭矩 | J4(回转) | 10.1N.m |
J5(摆动) | 10.1N.m | ||
J6(扭转) | 2.94N.m | ||
允许惯性矩 | J4(回转) | 0.38kg.m² | |
J5(摆动) | 0.38kg.m² | ||
J6(扭转) | 0.03kg.m² | ||
机器人动作范围截面面积 | 2.57m² ×340° | ||
使用环境条件 | 温度:0~45℃、湿度:20~80%RH(无结露) | ||
本体重量 | 189kg | ||
上部手臂可载重量 | 10kg(注3) | ||
安装方法 | 地面(注4) | ||
本体颜色 | 白色(芒赛尔色标10GY9/1) | ||
注1:位置重复精度遵照JIS B 8432 是标准的工具中心点(TCP)测量值
注2:第6轴的动作范围可能因第5轴的姿势而受到限制
注3:上部手臂可搬重量随着最大可搬重量可以变化
注4:需要侧挂、吊装规格时请咨询我司销售人员
规格参数
行业分类:
机械及行业设备
产品类别:
品 牌:
OTC
规格型号:
库 存:
200
生 产 商:
产 地:
中国广东省广州市

快速创建集企业介绍、产品服务、直播等一体的个性旺铺

升级成企业号帮助企业搭建社交移动互联网智能营销平台

自助开通商城,将智能营销平台、直播系统流量转化成交
